





OpenCR1.0
برند: ROBOTIS| وضعیت محصول: | کالا در انبار موجود و تحویل آن فوری میباشد. |
|---|
۳۵۸,۰۲۰,۰۰۰ریال
مشاهده سریع
OpenCR یک کنترلر متن باز و سخت افزار باز میباشد که میتواند تحت سیستم عامل ربات ها (ROS) و یا به صورت مستقل، ربات ها و دستگاه های مختلف را کنترل نماید.
از جمله ویژگیهای بارز OpenCR که مجهز به پردازنده قدرتمند ARM Cortex-M7 میباشد، پشتیبانی آسان و سریع از سروو موتورهای داینامیکسل، میباشد. داینامیکسل از دیگر محصولات شاخص شرکت رباتیس است و OpenCR سازگاری کامل با تمام سریها و مدلهای آن دارد.
محیط توسعه نرمافزاری OpenCR از محیط توسعه نرمافزاری Arduino بهره میگیرد که استفاده آن را برای گستره وسیعی از توسعه دهندگان نظیر دانشجویان علاقهمند تا توسعه دهندگان تجاری، مناسب و آسان میکند.
همچنین تمامی مشخصات بورد، شماتیکها، قطعات، کدهای ویژهی TurtleBot3 و ربات انساننمای OP3 به صورت رایگان و تحت لیسانس متنباز برای کاربران و جامعهی توسعه دهندگان ROS متنشر و به اشتراک گذاشته شده است.
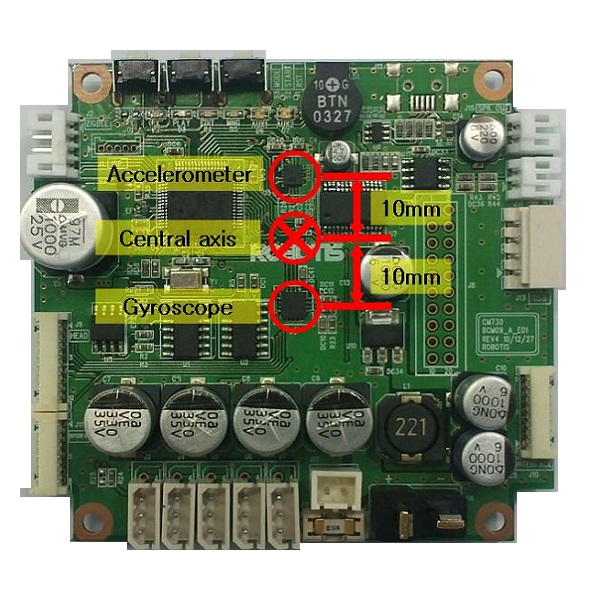
به منظور تسریع در توسعه دستگاه ها و ربات های پیچیده، بر روی این کنترلر، سامانه اندازه گیری اینرسی (IMU) که شامل شتاب سنج سه محوره، جایروسکوپ سه محوره و مغناطیس سنج (قطب نمای) سه محوره می باشد تعبیه شده است.
توضیحات
کنترلر OpenCR برای توسعه تحت سیستم عامل رباتها (ROS) به صورت متن باز و سخت افزار باز طراحی و ساخته شده است.
تمامی مشخصات بورد، شماتیکها، قطعات، کدهای فرمویر برای TurtleBot3 و ربات انساننمای OP3 به صورت رایگان و تحت لیسانس متنباز برای کاربران و جامعهی توسعه دهندگان ROS منتشر شده و قابل اشتراک گذاری است.
یکی از ویژگیهای برجسته این بورد در به کارگیری سری چیپستهای STM32F7 با معماری Cortex-M7 از پردازندههای قدرتمند ARM است.
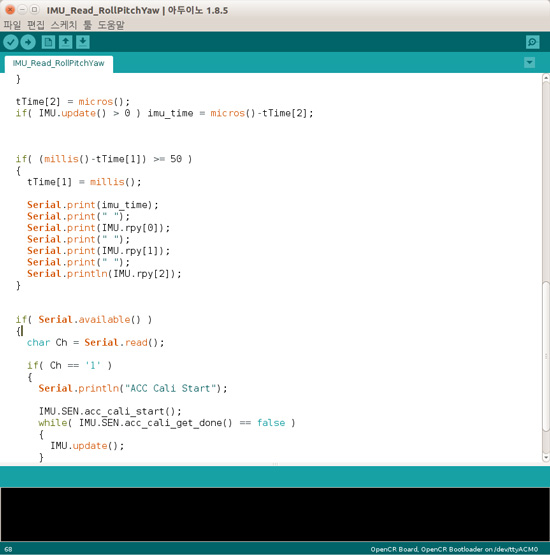
محیط توسعه نرمافزاری OpenCR از محیط توسعه نرمافزاری Arduino بهره میگیرد که استفاده آن را برای گستره وسیعی از توسعه دهندگان نظیر دانشجویان علاقهمند تا توسعه دهندگان تجاری، مناسب و آسان میکند.
ورودی و خروجیهای گوناگون، OpenCR را تبدیل به یک پلتفرم سخت افزاری/نرمافزاری ایدهآل جهت توسعه ROS و سیستم های نوین رباتیکی میکند.
طراحی این کنترلر به گونهای صورت گرفته است که استفاده از آن را برای مراحل مختلف توسعه تا تولید محصولتان، به آسانی ممکن میسازد.
از جمله ویژگیهای بارز OpenCR در پشتیبانی آسان و سریع از سروو موتورهای داینامیکسل، از دیگر محصولات شاخص شرکت رباتیس است که سازگاری کامل با همه سری و مدلهای آن دارد.
به منظور تسریع در توسعه سیستم های پیچیده رباتیکی، بر روی کنترلر سامانه اندازه گیری اینرسی (IMU) که شامل شتاب سنج سه محوره، ژیروسکوپ سه محوره و مغناطیس سنج (قطب نمای) سه محوره می باشد تعبیه شده است.
توسعه نرمافزاری به کمک OpenCR بسیار آسان است و به لطف نمونه کدهای کامل از تمامی تجهیزات و امکانات کنترلر، استفاده سریع و حداکثری از آن بسیار ساده شده است.
محیط برنامه نویسی OpenCR بر روی سیستم عاملهای لینوکس، ویندوز و مک قابل اجرا است.

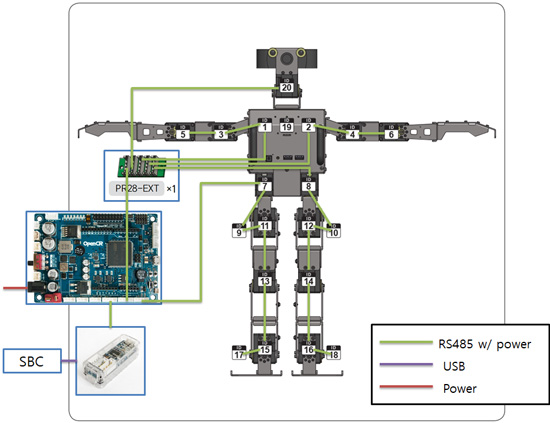
امکانات زیاد و خصوصیات متن باز و سختافزار باز OpenCR باعث شده است تا به عنوان سختافزار کنترلی و درایور اصلی دو پلتفرم رباتیکی حرفه ای رباتیس مورد استفاده قرار گیرد.
ROBOTIS OP3 سومین و جدیدترین نسل رباتهای انساننمای شرکت رباتیس است که کنترلر مرکزی و هدایت تکتک سروو موتورهای داینامیکسل توسط یک بورد OpenCR صورت میپذیرد.
OP3 بر بستر ROS قابل توسعه است این ویژگی به لطف پشتیبانی تمام عیار OpenCR از ROS و همچنین ارتباط آن با رایانه قدرتمند تعبیه شده بر روی ربات صورت میپذیرد.
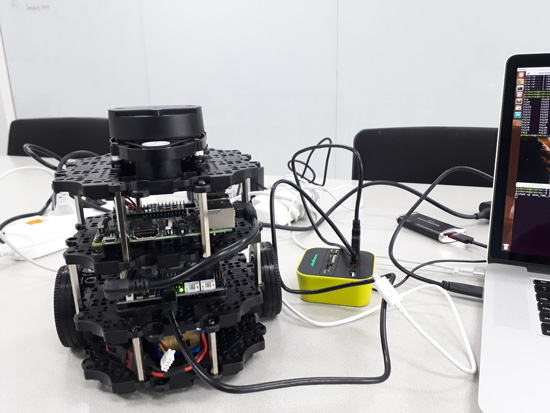
یکی دیگر از پلتفرمهای رباتیکی که به OpenCR مجهز شده است، پلتفرم رسمی توسعه ROS به نام TurtleBot3 است که بهترین و کاملترین ربات جهت آموختن و توسعه ROS محسوب میشود.

مشخصات فنی
| پردازنده | STM32F746ZGT6 / 32-bit ARM Cortex®-M7 with FPU (216MHz, 462DMIPS) |
|---|---|
| پروتکل ارتباطی | DYNAMIXEL Protocol 2.0, RS485 Asynchronous Serial Communication (8bit, 1stop, No Parity) |
| نوع ارتباط | |
| سنسورها | Gyroscope 3Axis, Accelerometer 3Axis, Magnetometer 3Axis (MPU9250) |
| محصولات سازگار | Arduino, DYNAMIXEL AX/MX Series, DYNAMIXEL P-Series, DYNAMIXEL X-Series, OLLO Sensors, ROBOTIS RC-100, Robotis Sensor Products |
| ولتاژ مجاز | 12V 5A, 5 V (USB VBUS), 5-24 V (Battery or SMPS), LI-PO 11.1V |
| ولتاژ خروجی | |
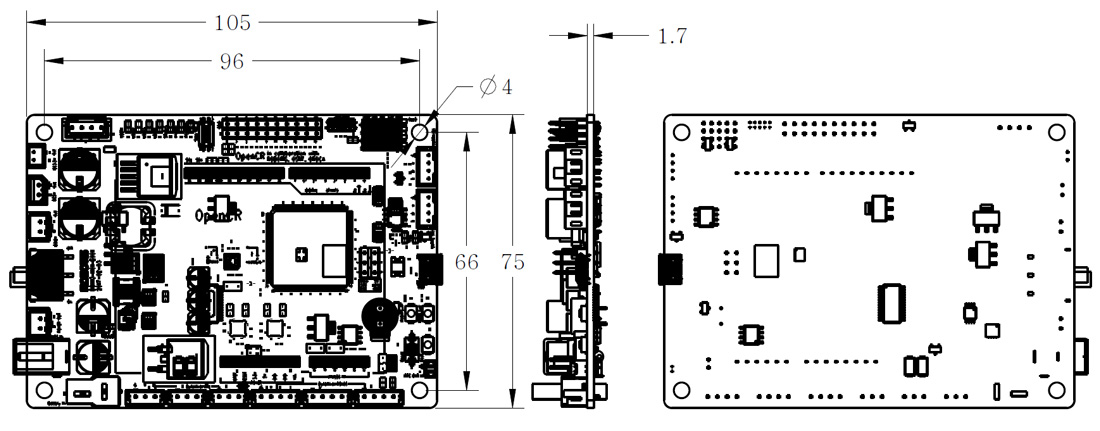
| ابعاد محصول | 105mm X 75mm |
| وزن محصول | 60 گرم |
| برند / برندها | |
| کشور سازنده |




نقد و بررسیها
هنوز بررسیای ثبت نشده است.