

مرتبسازی بر اساس:

GRP-X430-AL
۷۴,۱۷۰,۰۰۰ریال – ۱۳۷,۳۷۰,۰۰۰ریالگریپر GRP-X430، یک گریپر بر مبنای سروموتورهای DYNAMIXEL XM-430 و سروموتورهای هم سایز آن میباشد. فکهای این گریپر همیشه در…انتخاب گزینه خرید این محصول دارای انواع مختلفی می باشد. گزینه ها ممکن است در صفحه محصول انتخاب شوندمقایسهGRP-AX-AL
۷۴,۱۷۰,۰۰۰ریال – ۱۸۶,۹۹۰,۰۰۰ریالگریپر GRP-AX توانایی گرفتن و جابجایی ۳۰۰ تا ۴۰۰ گرم را داراست. فکهای این گریپر همیشه در حالت موازی با…انتخاب گزینه خرید این محصول دارای انواع مختلفی می باشد. گزینه ها ممکن است در صفحه محصول انتخاب شوندمقایسهDOBOT Magician Sliding Rail Kit
قیمت: تماس بگیریدبه کمک این ریل، بازوی شما میتواند حدود 1 متر با سرعت 150 میلیمتر بر ثانیه و تکرارپذیری یک صدم…DOBOT CR5
قیمت: تماس بگیریدSafe, Flexible and Self Learning Collaborative Robot Arm بازوهای رباتیک همکار کمپانی DOBOT یکی از بهترین و مقرون بهصرفهترین انتخابهای…Universal Robots – UR16e
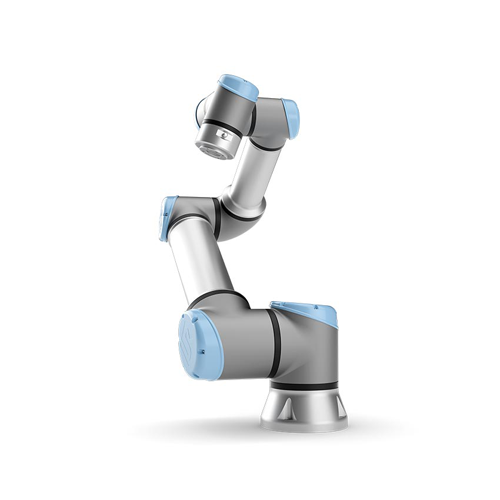
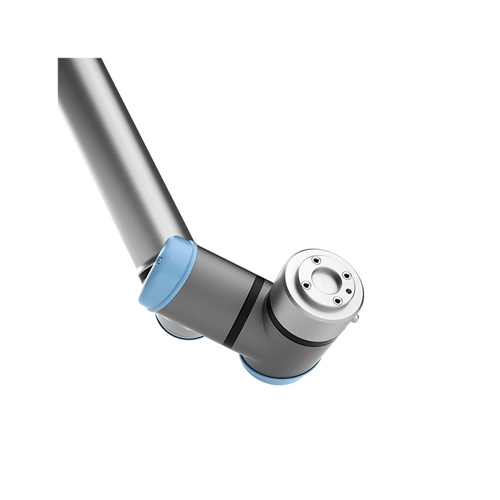
قیمت: تماس بگیریدکاربرد این ربات صنعتی همکار در مقایسه با دیگر رقبای خود، قابل مقایسه نیست! بازوی UR16e برای انجام وظایف دشوار…Dobot Magician Basic
قیمت: تماس بگیریدDOBOT Magician یک بازوی رباتیک رومیزی چندکاره است که با هدف آموزش عملی مهارتها ارائه شده است. این ربات به…ROBOTIS HAND RH-P12-RN
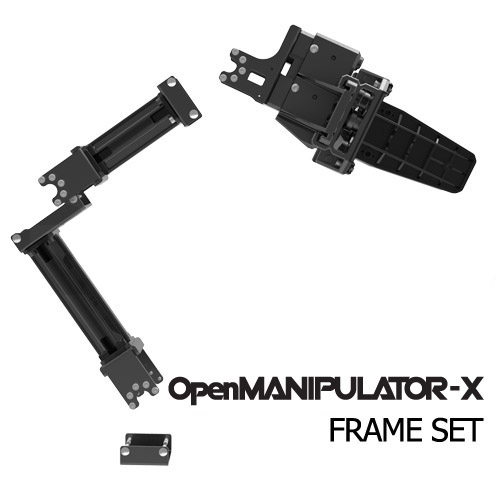
قیمت: تماس بگیریددست رباتیکی ROBOTIS HAND RH-P12-RN یک گریپر دو انگشتی محصول کمپانی کرهای ROBOTIS میباشد. این گریپر کاملا با DYNAMIXEL 2.0…OpenManipulator-X RM-X52 Frame Set
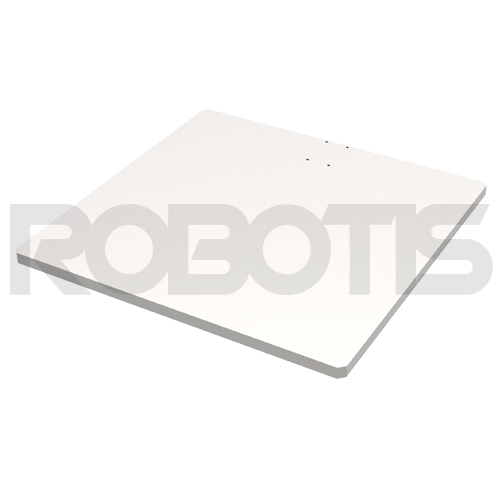
۴۵۵,۹۹۰,۰۰۰ریالاگر به دنبال یک بازوی رباتیک پژوهشی پیشرفته به صورت سخت افزار/متن باز میگردید، کیت OpenManipulator X بهترین پیشنهاد ما به…OpenManipulator Base Plate-02
قیمت: تماس بگیریدصفحه اتصال بازوی رباتیک OpenManipulator-X (RM-X52) به میز یا سایر سطوح.Universal Robots – UR10e
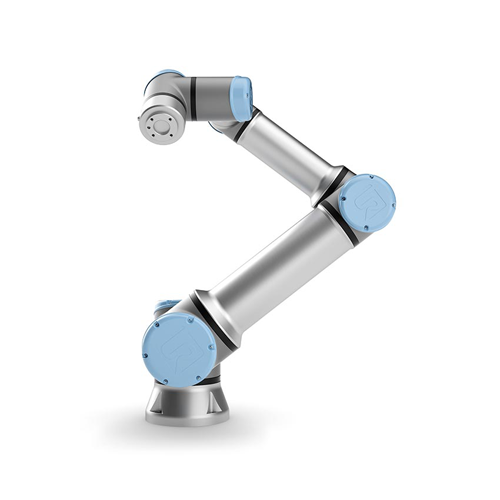
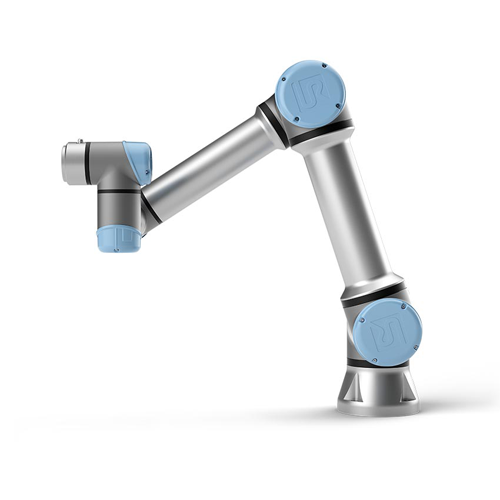
قیمت: تماس بگیریدیک ربات صنعتی همکار تمام عیار ربات همکار UR10e یکی از بزرگترین بازوهای رباتیک صنعتی Universal Robots میباشد که برای…Universal Robots – UR5e
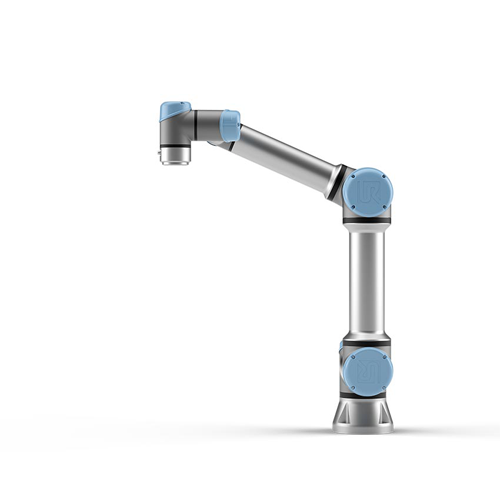
قیمت: تماس بگیریدیک ربات با انعطاف پذیری بالا بازوی ربات صنعتی همکار سبک و انعطافپذیر UR5e ساخت شرکت Universal Robots به شما…Universal Robots – UR3e
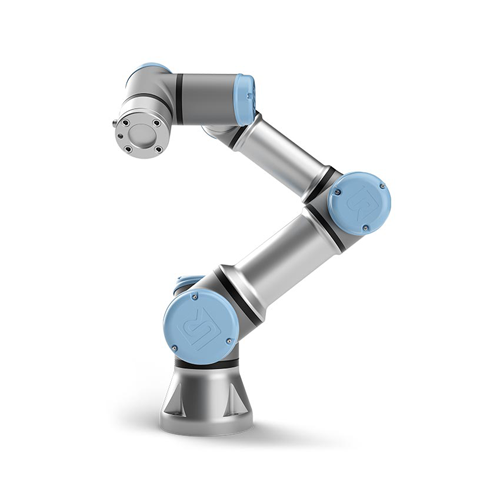
قیمت: تماس بگیریدیک ربات رومیزی بسیار انعطاف پذیر محصول جدید یونیورسال روبوتز با نام UR3e، یک ربات همکار رومیزی کوچک برای انجام…












مرتبسازی بر اساس: