














Logic Pack 1
برند: PISHROBOT
قابل سفارش:
بله
| وضعیت محصول: | کالا در انبار موجود و تحویل آن فوری میباشد. |
|---|
۲۲,۰۰۰,۰۰۰ریال
مشاهده سریع
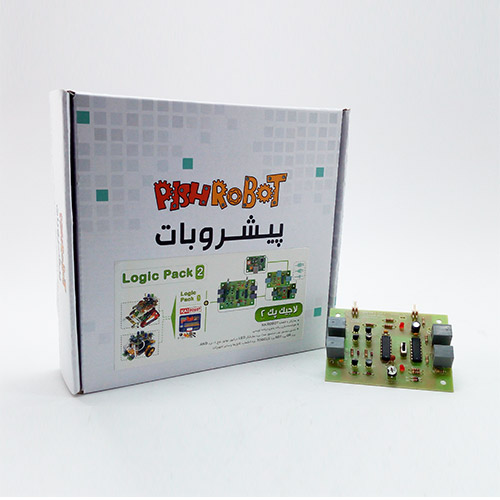
پک لاجیک ۱ امکان تجربه و آشنایی با سنسورهای گوناگون و به طور کلی هوشمندسازی رباتها را بدون برنامهنویسی و استفاده از کامپیوتر برای دانشآموزان و علاقمندان به رباتهای هوشمند فراهم میآورد.
ایده ساخت این پک، الهام گرفته شده از محصولات رایج در اتوماسیون صنعتی مانند: دربهای خودکار، پرسهای صنعتی سیستمهای اعلام آتشسوزی، دستگاههای خانگی و… میباشد.
آموزشهای مربوط به پک لاجیک در دورههای KAI ROBOTارائه میگردد و این پک در رباتهای امدادگر و اتومبیلهای بدونراننده و دیگر ربات ها استفاده می شود.










fkarimi28 (خریدار محصول) –
سلام ببخشید چند روز طول می کشه تحویل ببدید
Pishrobot –
سلام اگر تهران باشید همان روز براتون ارسال میشه و اگر شهرستان باشید به اداره پست تحویل داده میشه
Sina –
درود بر شما . بنده هم لاجیک پک ۱ و هم ۲ رو تهیه کردم و الان ۳ سنسور نور ، ۴ LED و ۲ سنسور صدا موجود دارم و مطمئنم جداگانه خریداری نکردم…به هر حال اگه شما اضافه قرار دادین ، حلال کنین:)
pishrobot –
سلام، خیلی ممنون از پیام شما. مشکلی نداره. 🙂 حلال حلال…
Sina –
ولی پکی که من دریافت کردم(حدود ۳ سال پیش) ، هم سنسور صدا داره و هم LED:) علاوه بر اون یه سنسور نور هم داره
pishrobot –
سلام آقا سینای عزیز، از اول پک لاجیک ۱ و ۲ با این ترکیبی که تو سایت اومده عرضه شده. ممکنه شما جداگانه این سنسورها رو خریداری کردید.
Sina –
سلام آیا این پک شامل سنسور نور ، سنسور صدا و LED هم میشه یا خیر ؟
pishrobot –
خیر، این سنسورها در Logic Pack 2 هستند:
https://shop.pishrobot.com/product/logic-pack-2
پک لاجیک ۲ شامل موارد ذیل هست:
سنسور نور: 2 عدد
سنسور صدا: 1 عدد
برد نمایشگر LED (چراغ): 2 عدد
درایور موتور نوع 1: 1 عدد
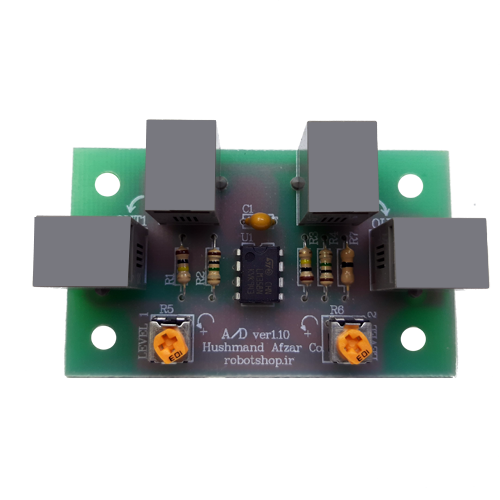
برد AND (منطق و): 1 عدد
برد OR (منطق یا): 1 عدد
برد NOT (منطق نه): 1 عدد
برد TOGGLE (منطق عکس): 1 عدد
برد انشعاب: 1 عدد
کابلها و سایر تجهیزات