


U2D2 PHB Set
برند: ROBOTIS| وضعیت محصول: | کالا در انبار موجود و تحویل آن فوری میباشد. |
|---|
۳۱,۶۵۰,۰۰۰ریال
مشاهده سریع
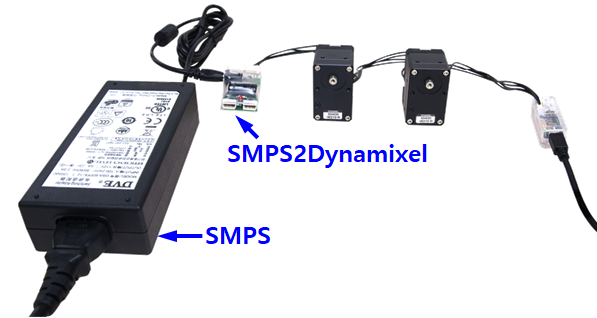
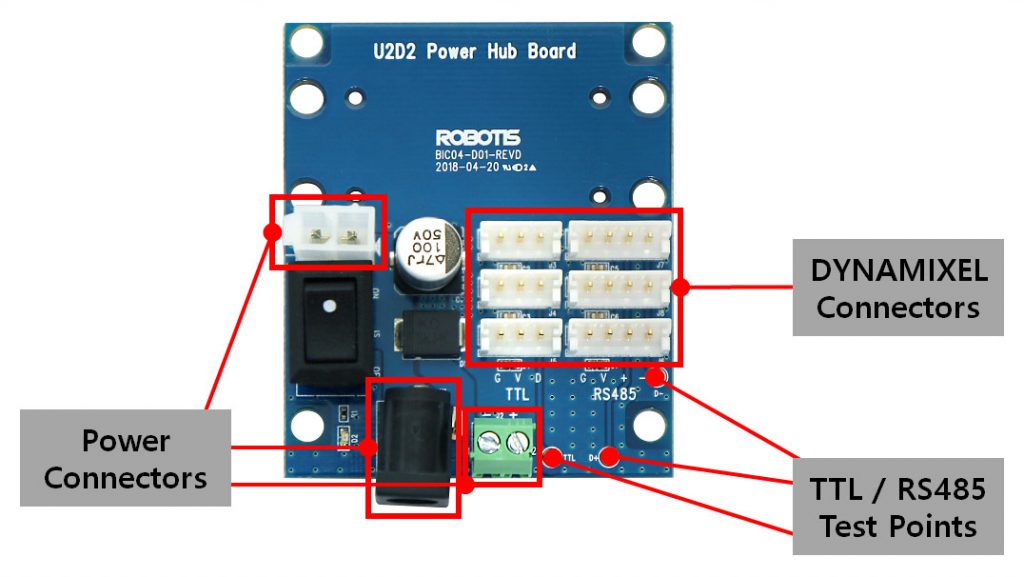
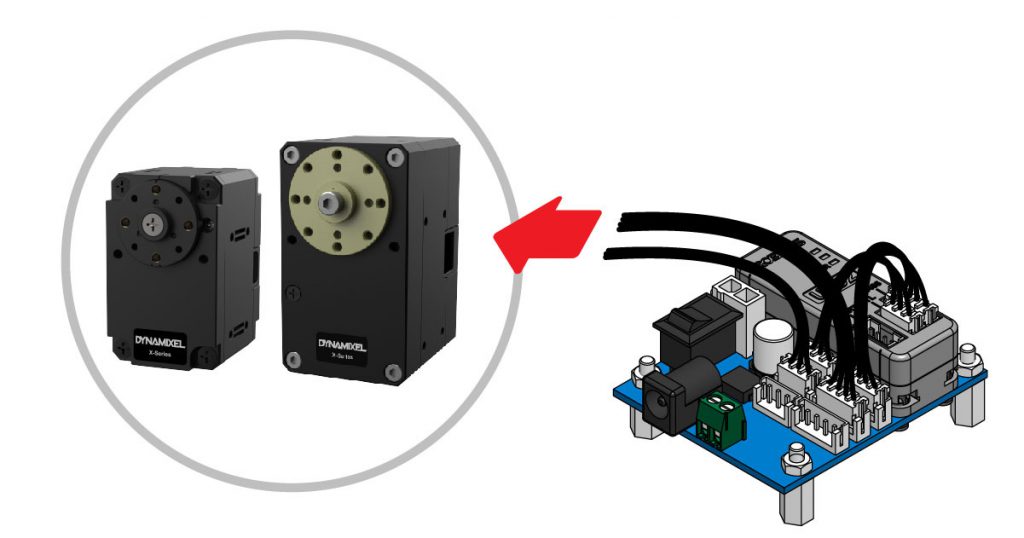
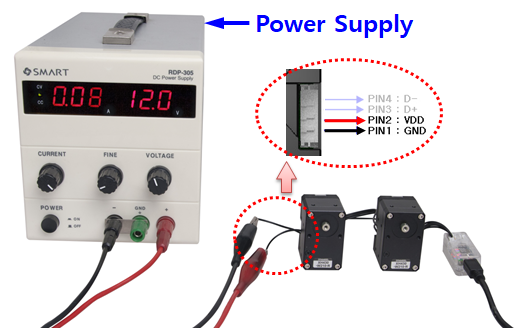
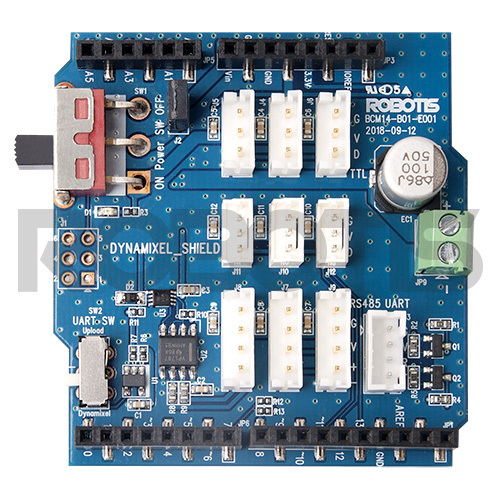
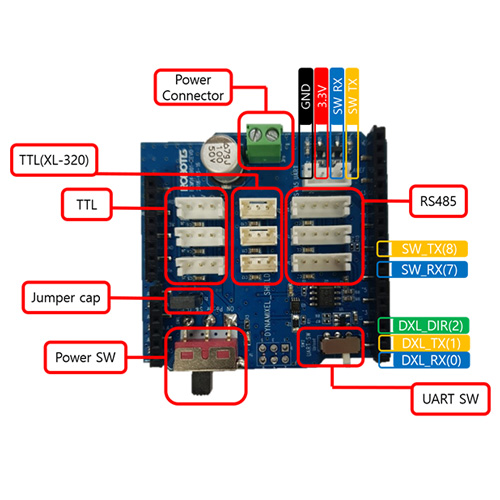
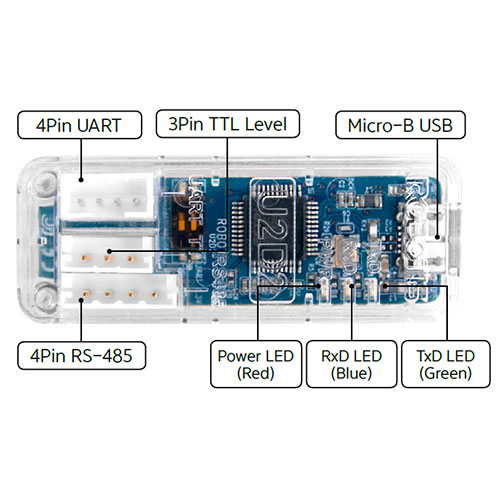
در صورتی که از اینترفیس U2D2 برای ارتباط داینامیکسل با رایانه استفاده میکنید، برد U2D2 Power Hub یکی از بهترین انتخابهای شما برای تامین ایمن تغذیه موتورهایتان خواهد بود. این برد با پشتیبانی 3.5 تا 24 ولت و ماکزیمم جریان قابل ارائه 10 آمپر، میتواند میزبان سری جدید موتورهای داینامیکسل؛ از سری ایکس تا پرو و در هر دو پروتکل TTL و RS485 باشد. برای سریهای قبلی داینامیکسل نیز فقط کافیست کابل تبدیل آن را از پیشروبات تهیه نمایید و با خیال راحت سروو موتورهای خود را به حرکت در آوردید.
توضیحات

مشخصات فنی
| برند / برندها | |
|---|---|
| ولتاژ تغذیه | |
| جریان تغذیه | |
| ابعاد محصول | 48mm X 57mm |
| نوع ارتباط | |
| پروتکل ارتباطی | DYNAMIXEL Protocol 2.0, RS485 Asynchronous Serial Communication (8bit, 1stop, No Parity) |
| محصولات سازگار | DYNAMIXEL AX/MX Series, DYNAMIXEL P-Series, DYNAMIXEL X-Series |
| سایر مشخصات | به همراه کابل ۱۰۰ میلی متری X3P و X4P – توجه:جهت راه اندازی با موتورهای سری AX/MXُ نیاز به خرید جداگانه کابل تبدیل X3P Convertible خواهید داشت. |
| لینک راهنمای کاربر | http://emanual.robotis.com/docs/en/parts/interface/u2d2_power_hub/ |






نقد و بررسیها
هنوز بررسیای ثبت نشده است.