

مرتبسازی بر اساس:
- تخفیف!

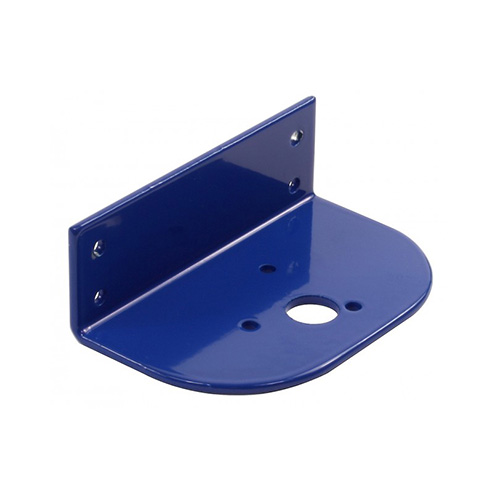
EMG30MB
قیمت اصلی ۶,۰۸۰,۰۰۰ریال بود.۴,۲۵۰,۰۰۰ریالقیمت فعلی ۴,۲۵۰,۰۰۰ریال است.یک پایه آلومینیومی برای موتور EMG30 
- تخفیف!
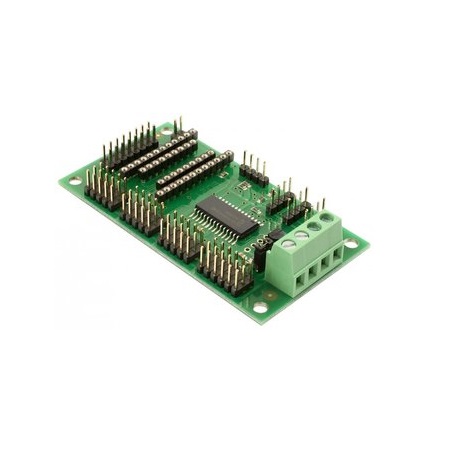
MD25
قیمت اصلی ۸۳,۱۳۰,۰۰۰ریال بود.۶۶,۵۱۰,۰۰۰ریالقیمت فعلی ۶۶,۵۱۰,۰۰۰ریال است.درايور موتور 12 ولت 2.8 آمپر با دو خروجی به صورت پل H - تخفیف!

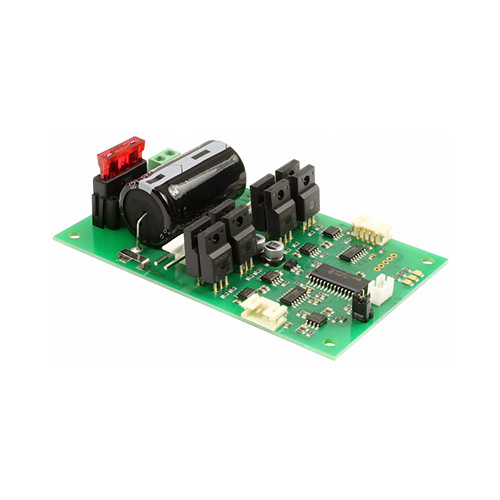
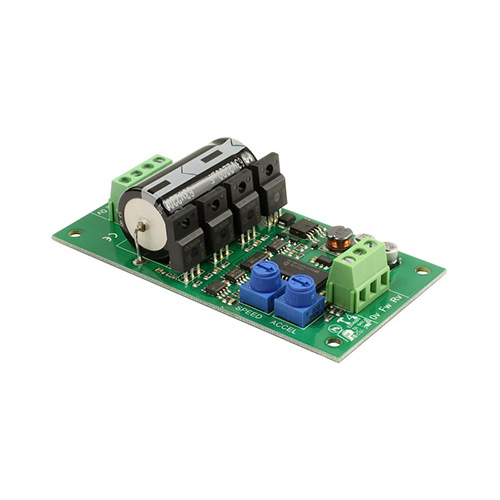
MD22
قیمت اصلی ۱۰۲,۹۷۰,۰۰۰ریال بود.۷۲,۰۸۰,۰۰۰ریالقیمت فعلی ۷۲,۰۸۰,۰۰۰ریال است.درايور موتور 24 ولت 5 آمپر با دو خروجی به صورت پل H - تخفیف!
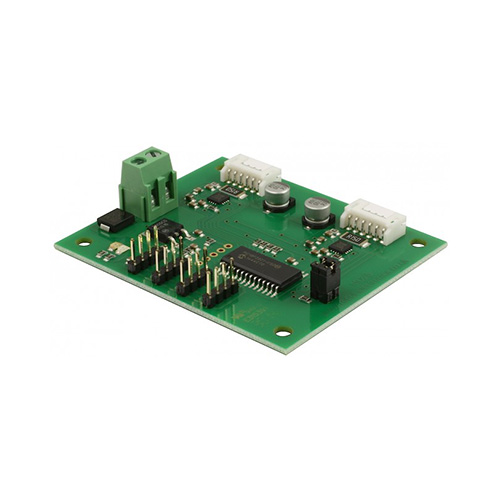
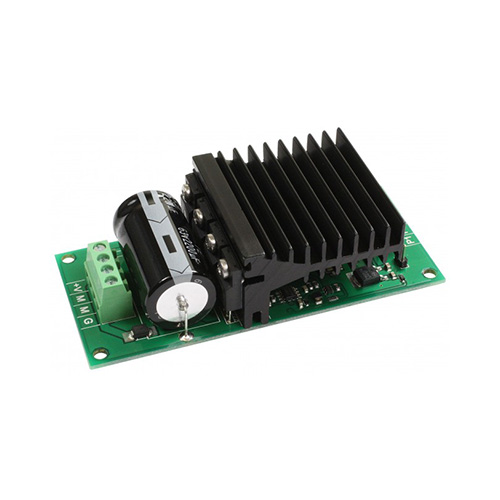
MD14
قیمت اصلی ۱۰۲,۹۷۰,۰۰۰ریال بود.۷۲,۰۸۰,۰۰۰ریالقیمت فعلی ۷۲,۰۸۰,۰۰۰ریال است.درايور موتور 24 ولت 5 آمپر با يک خروجی به صورت پل H MD04
۹۱,۲۸۰,۰۰۰ریالدرايور موتور 24 ولت 20 آمپر با يک خروجی به صورت پل H این محصول، نسخه جدید درایور MD03 میباشد.- تخفیف!
SCR02
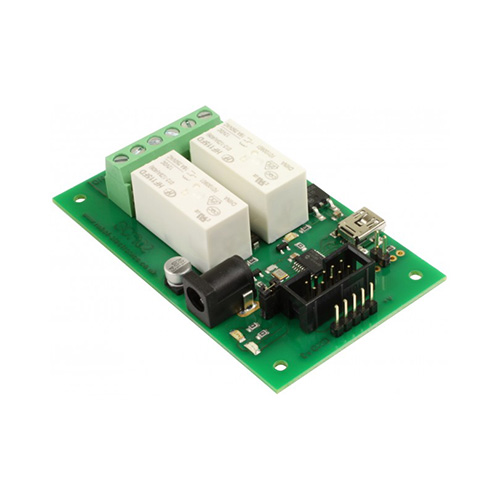
قیمت اصلی ۶۶,۶۰۰,۰۰۰ریال بود.۲۶,۶۴۰,۰۰۰ریالقیمت فعلی ۲۶,۶۴۰,۰۰۰ریال است.رله هوشمند و قابل برنامه ریزی dS3484
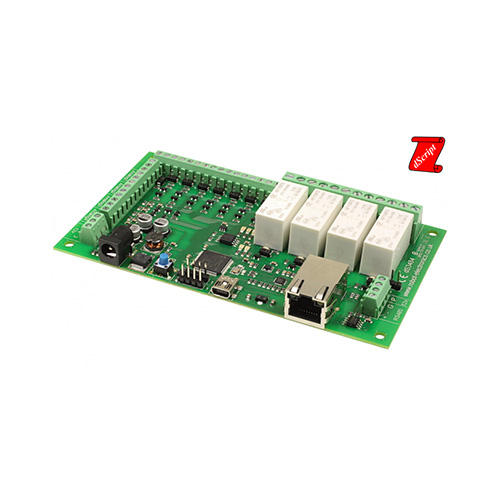
۱۳۸,۶۹۰,۰۰۰ریالماژول رله تحت شبکه با قابلیت برنامه ریزی واسط Ethernet به 4 رله، 3 پورت سریال، 8 ورودی/خروجی ديجيتال و 4 ورودی…dS1242
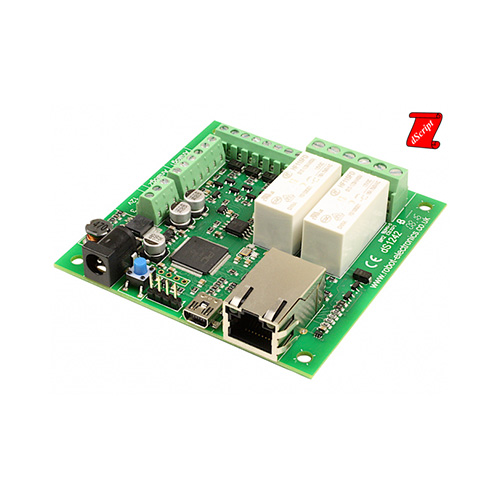
۱۰۶,۵۸۰,۰۰۰ریالماژول رله تحت شبکه با قابلیت برنامه ریزی واسط Ethernet به 2 رله، 1 پورت سریال، 4 ورودی/خروجی ديجيتال و 2 ورودی…- تخفیف!
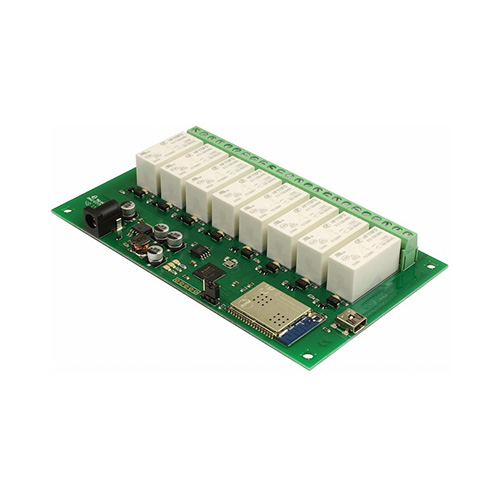
WIFI008
قیمت اصلی ۸۱,۲۶۰,۰۰۰ریال بود.۶۰,۹۵۰,۰۰۰ریالقیمت فعلی ۶۰,۹۵۰,۰۰۰ریال است.ماژول رله تحت WiFi واسط WiFi به 8 عدد رله


مرتبسازی بر اساس: