

مرتبسازی بر اساس:
- تخفیف!

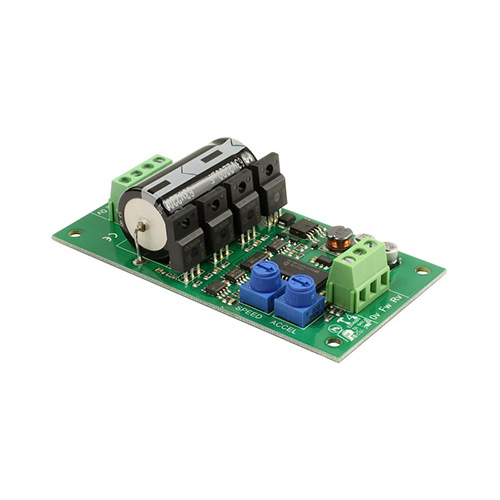
MD14
قیمت اصلی ۹۰,۲۵۰,۰۰۰ریال بود.۶۳,۱۸۰,۰۰۰ریالقیمت فعلی ۶۳,۱۸۰,۰۰۰ریال است.درايور موتور 24 ولت 5 آمپر با يک خروجی به صورت پل H - تخفیف!
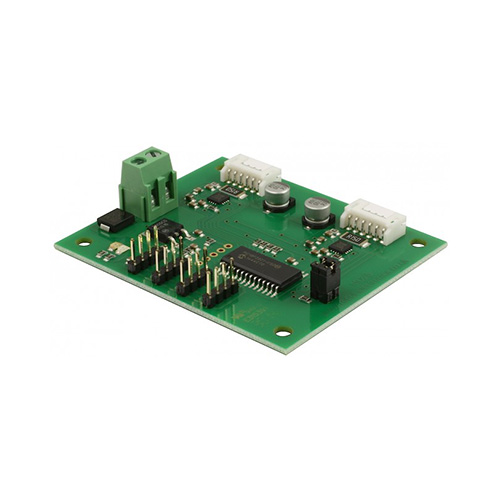
MD25
قیمت اصلی ۷۲,۸۷۰,۰۰۰ریال بود.۵۸,۲۹۰,۰۰۰ریالقیمت فعلی ۵۸,۲۹۰,۰۰۰ریال است.درايور موتور 12 ولت 2.8 آمپر با دو خروجی به صورت پل H - تخفیف!
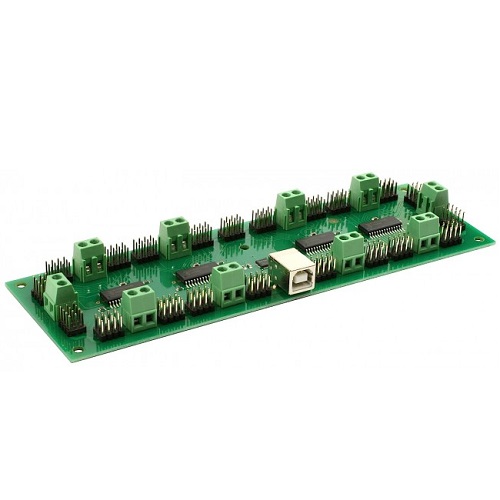
SD84
قیمت اصلی ۱۰۰,۷۱۰,۰۰۰ریال بود.۳۰,۲۱۰,۰۰۰ریالقیمت فعلی ۳۰,۲۱۰,۰۰۰ریال است.ماژول درایور سرو موتور 84 تایی با قابلیت تبدیل به کانال ورودی خروجی دیجیتال و آنالوگ - تخفیف!
Wheel100
قیمت اصلی ۱۵,۷۸۰,۰۰۰ریال بود.۹,۴۷۰,۰۰۰ریالقیمت فعلی ۹,۴۷۰,۰۰۰ریال است.چرخ 100 ميلیمتر با پهنای 26 میلیمتر و شفت 5 میلیمتر - تخفیف!

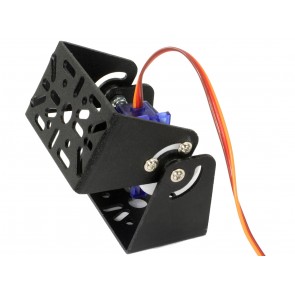
Pan&Tilt Bracket
قیمت اصلی ۱۰,۳۹۰,۰۰۰ریال بود.۶,۲۴۰,۰۰۰ریالقیمت فعلی ۶,۲۴۰,۰۰۰ریال است.براکتهای پن و تیل با قابلیت نصب سنسورهای آلتراسونیک دیونتک، مادون قرمز شارپ و ... - تخفیف!
RF04/400
قیمت اصلی ۸۳,۰۰۰,۰۰۰ریال بود.۲۰,۷۵۰,۰۰۰ریالقیمت فعلی ۲۰,۷۵۰,۰۰۰ریال است.به کمک مجموعه ارتباط بیسیم RF04 و CM02 میتوان به راحتی بین کامپیوتر و ربات خود ارتباط بی سیم برقرار… - تخفیف!
RF04/900
قیمت اصلی ۸۳,۰۰۰,۰۰۰ریال بود.۲۰,۷۵۰,۰۰۰ریالقیمت فعلی ۲۰,۷۵۰,۰۰۰ریال است.به کمک مجموعه ارتباط بیسیم RF04 و CM02 میتوان به راحتی بین کامپیوتر و ربات خود ارتباط بی سیم برقرار… - تخفیف!
CM02/400
قیمت اصلی ۸۳,۰۰۰,۰۰۰ریال بود.۲۰,۷۵۰,۰۰۰ریالقیمت فعلی ۲۰,۷۵۰,۰۰۰ریال است.به کمک مجموعه ارتباط بیسیم RF04 و CM02 میتوان به راحتی بین کامپیوتر و ربات خود ارتباط بی سیم برقرار… - تخفیف!
CM02/900
قیمت اصلی ۸۳,۰۰۰,۰۰۰ریال بود.۲۰,۷۵۰,۰۰۰ریالقیمت فعلی ۲۰,۷۵۰,۰۰۰ریال است.به کمک مجموعه ارتباط بیسیم RF04 و CM02 میتوان به راحتی بین کامپیوتر و ربات خود ارتباط بی سیم برقرار… - تخفیف!
LCD03-20×4-Green
قیمت اصلی ۳۹,۵۷۰,۰۰۰ریال بود.۱۹,۷۹۰,۰۰۰ریالقیمت فعلی ۱۹,۷۹۰,۰۰۰ریال است.صفحه نمايش LCD 20x4 سبز با قابليت ارتباط سريال و I2C - تخفیف!
LCD03-20×4-Blue
قیمت اصلی ۳۹,۵۷۰,۰۰۰ریال بود.۱۹,۷۹۰,۰۰۰ریالقیمت فعلی ۱۹,۷۹۰,۰۰۰ریال است.صفحه نمايش LCD 20x4 آبی با قابليت ارتباط سريال و I2C - تخفیف!
LCD03-16×2-Green
قیمت اصلی ۲۷,۶۹۰,۰۰۰ریال بود.۱۳,۸۴۰,۰۰۰ریالقیمت فعلی ۱۳,۸۴۰,۰۰۰ریال است.صفحه نمايش LCD 16x2 سبز با قابليت ارتباط سريال و I2C




مرتبسازی بر اساس: