

مرتبسازی بر اساس:
- تخفیف!

FR08-B101K Set
قیمت اصلی ۶۳,۴۸۰,۰۰۰ریال بود.۲۵,۳۹۰,۰۰۰ریالقیمت فعلی ۲۵,۳۹۰,۰۰۰ریال است.فریم پشت (Back) برای EX-106، MX-106 - تخفیف!
FR08-X101K Set
قیمت اصلی ۶۳,۴۸۰,۰۰۰ریال بود.۲۵,۳۹۰,۰۰۰ریالقیمت فعلی ۲۵,۳۹۰,۰۰۰ریال است.فریم اتصال (Cross) پشت به کنار دو داینامیکسل از نوع EX-106، MX-106 - تخفیف!
FR05-B101K Set
قیمت اصلی ۶۳,۴۸۰,۰۰۰ریال بود.۲۵,۳۹۰,۰۰۰ریالقیمت فعلی ۲۵,۳۹۰,۰۰۰ریال است.فریم پشت (Back) برای RX-64، MX-64 - تخفیف!
FR07-X101K Set
قیمت اصلی ۶۳,۴۸۰,۰۰۰ریال بود.۲۵,۳۹۰,۰۰۰ریالقیمت فعلی ۲۵,۳۹۰,۰۰۰ریال است.فریم اتصال (Cross) پشت به کنار دو داینامیکسل از نوع RX-24F، RX-28، MX-28 
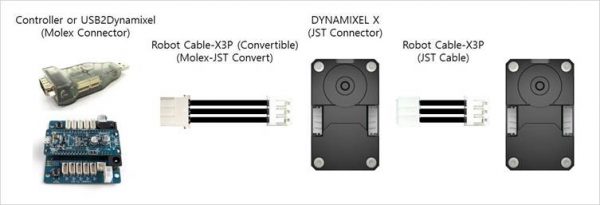
Robot Cable-X3P 180mm (Convertible) 10pcs
۲۵,۸۲۰,۰۰۰ریالبسته ده تایی کابل 18 سانتیمتری داینامیکسل نوع سه سیم برای اتصال سری X به سری های قدیمی
- تخفیف!
FR05-X101K Set
قیمت اصلی ۶۹,۳۱۰,۰۰۰ریال بود.۲۷,۷۲۰,۰۰۰ریالقیمت فعلی ۲۷,۷۲۰,۰۰۰ریال است.فریم اتصال (Cross) پشت به کنار دو داینامیکسل از نوع RX-64، MX-64 - تخفیف!
Robot Cable-4P 180mm 10pcs
قیمت اصلی ۳۳,۶۶۰,۰۰۰ریال بود.۲۸,۶۱۰,۰۰۰ریالقیمت فعلی ۲۸,۶۱۰,۰۰۰ریال است.بسته ده تایی کابل 18 سانتیمتری داینامیکسل نوع چهار سیم - تخفیف!
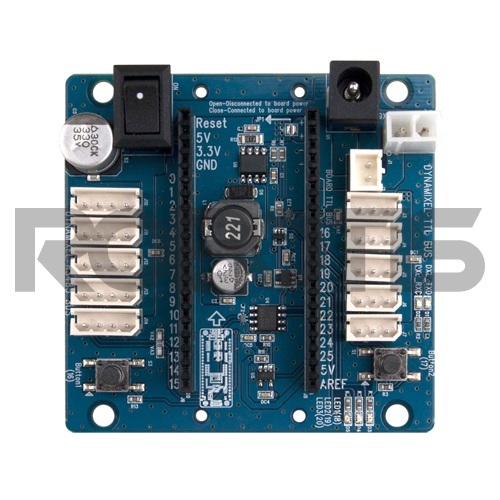
OpenCM 485 Expansion Board
قیمت اصلی ۵۹,۴۹۰,۰۰۰ریال بود.۲۹,۷۴۰,۰۰۰ریالقیمت فعلی ۲۹,۷۴۰,۰۰۰ریال است.به کمک این ماژول و نصب کنترلر OpenCM9.04 بر روی آن، میتوان علاوه بر موتورهای Dynamixel با پروتکل ارتباطی TTL… Robot Cable-X3P 180mm 10pcs
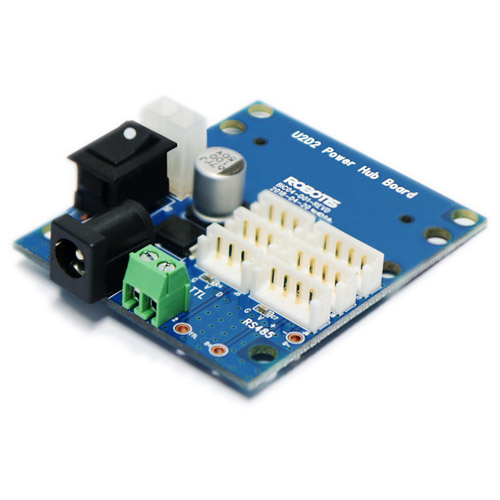
۳۱,۶۵۰,۰۰۰ریالبسته ده تایی کابل 18 سانتیمتری داینامیکسل سری X نوع سه سیمU2D2 PHB Set
۳۱,۶۵۰,۰۰۰ریالدر صورتی که از اینترفیس U2D2 برای ارتباط داینامیکسل با رایانه استفاده میکنید، برد U2D2 Power Hub یکی از بهترین…- تخفیف!
FR07-F101K Set
قیمت اصلی ۸۳,۴۷۰,۰۰۰ریال بود.۳۳,۳۹۰,۰۰۰ریالقیمت فعلی ۳۳,۳۹۰,۰۰۰ریال است.فریم نقطه اتصال کناری (Flange Bearing) برای RX-24F، RX-28، MX-28 - تخفیف!
FRP42-A110K Set
قیمت اصلی ۶۹,۸۰۰,۰۰۰ریال بود.۳۴,۹۰۰,۰۰۰ریالقیمت فعلی ۳۴,۹۰۰,۰۰۰ریال است.فریم Adaptor برای مدلهای سایز 42 داینامیکسل PRO - تخفیف!
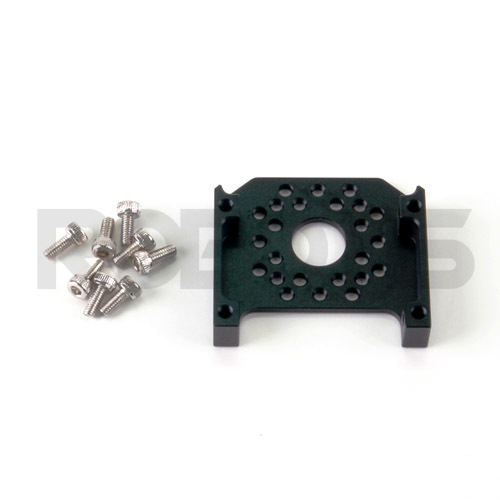
FR05-F101K Set
قیمت اصلی ۸۷,۴۶۰,۰۰۰ریال بود.۳۴,۹۹۰,۰۰۰ریالقیمت فعلی ۳۴,۹۹۰,۰۰۰ریال است.فریم نقطه اتصال کناری (Flange Bearing) برای RX-64، MX-64، MX-106




















مرتبسازی بر اساس: