

مرتبسازی بر اساس:
- تخفیف!

DYNAMIXEL Shield for Arduino MKR Series
قیمت اصلی ۳۹,۹۴۰,۰۰۰ریال بود.۲۷,۹۶۰,۰۰۰ریالقیمت فعلی ۲۷,۹۶۰,۰۰۰ریال است.به کمک این شیلد میتوانید موتورهای داینامیکسل خود را به وسیله بوردهای آردوینو سری MKR به آسانی، بدون نگرانی و… 
CM-550
۲۷۴,۵۲۰,۰۰۰ریالکنترلر CM550 علاوه بر عملگرهای داینامیکسل نوع TTL قابلیت ارتباط با ورودی / خروجیهای عمومی (GPIO) را نیز دارا میباشد.…PRB-300B Controller
۴۶,۰۰۰,۰۰۰ریالربات خود را با بلوتوث برنامه ریزی و کنترل کنید. به کمک کنترلر قابل برنامه نویسی PRB-300B، میتوان رباتهای مختلف را علاوه…PRB-300 Controller
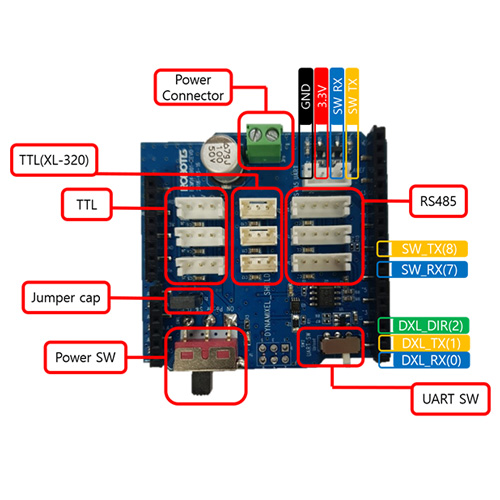
۴۳,۴۰۰,۰۰۰ریالبه کمک کنترلر قابل برنامه نویسی PRB-300، میتوان رباتهای مختلف را برنامه ریزی و کنترل نمود و آنها را هوشمند…DYNAMIXEL Shield
۴۹,۹۷۰,۰۰۰ریال- از داینامیکسل شیلد، برای کنترل Dynamixel با استفاده از برد های Arduino استفاده میشود. - داینامیکسل شیلد در…
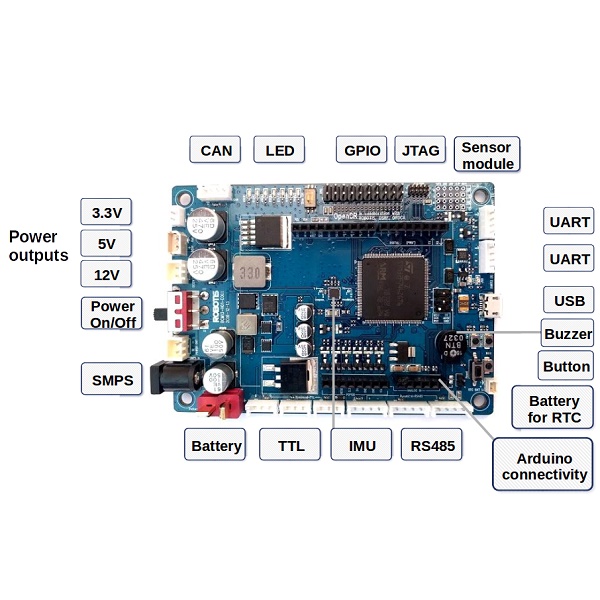
OpenCR1.0
۴۴۹,۳۱۰,۰۰۰ریالOpenCR یک کنترلر متن باز و سخت افزار باز میباشد که میتواند تحت سیستم عامل ربات ها (ROS) و یا…- تخفیف!
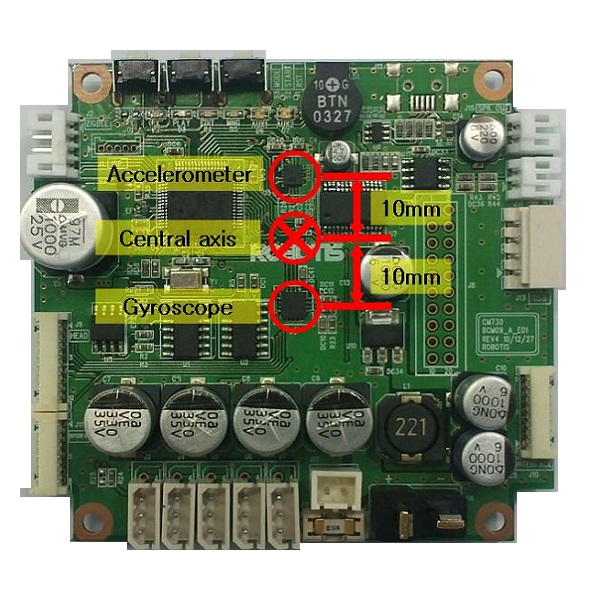
CM-730
قیمت اصلی ۲۰۱,۱۴۰,۰۰۰ریال بود.۶۰,۳۴۰,۰۰۰ریالقیمت فعلی ۶۰,۳۴۰,۰۰۰ریال است.کنترلر قابل برنامه نویسی CM-730 مخصوص ROBOTIS OP - تخفیف!
Fit-PC2i
قیمت اصلی ۴۲۲,۴۰۰,۰۰۰ریال بود.۱۰۵,۶۰۰,۰۰۰ریالقیمت فعلی ۱۰۵,۶۰۰,۰۰۰ریال است.fit-PC2 is a miniature fan less PC based on Atom CPU. It is extremely small and extremely energy efficient, but… - تخفیف!
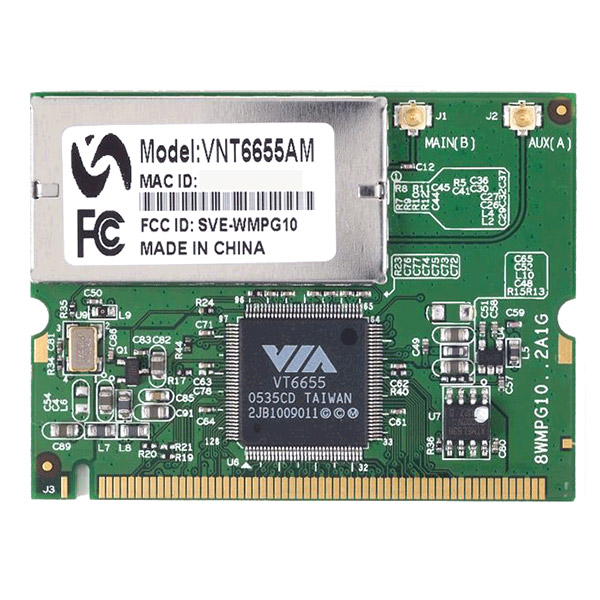
RoBoard WLAN set
قیمت اصلی ۳۷,۶۴۰,۰۰۰ریال بود.۷,۵۳۰,۰۰۰ریالقیمت فعلی ۷,۵۳۰,۰۰۰ریال است.کارت شبکه بی سیم Mini PCI سازگار با کامپیوتر RB-110 و مادربوردهای دارای Mini PCI مدل: VNT6655AM چیپ: VIA VT6655 - تخفیف!
VGA card for RB-100/RB-110
قیمت اصلی ۴۵,۱۷۰,۰۰۰ریال بود.۲۷,۱۰۰,۰۰۰ریالقیمت فعلی ۲۷,۱۰۰,۰۰۰ریال است.کارت گرافیکی برای کامپیوتر RB-100 و RB-110 DEV-PIC32MX795F512H
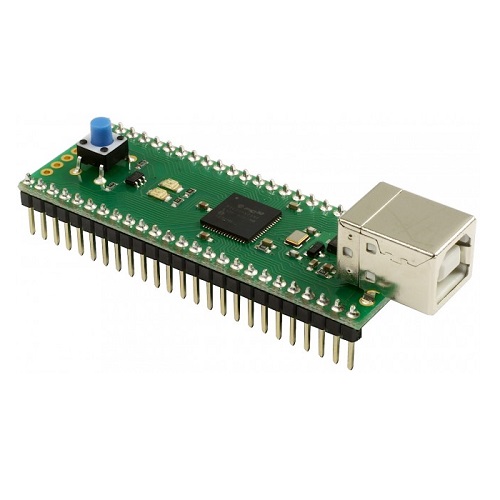
قیمت: تماس بگیریدماژولهای کنترل کننده ربات DEV-PIC32MX795F512H و DEV-PIC24FJ256GB206 و DEV-PIC18F67J50 ماژولهایی قابل برنامه ریزی برای کنترل ربات بر پایه میکروکنترلرهای برگزیده…- تخفیف!
DEV-PIC24FJ256GB206
قیمت اصلی ۵۱,۳۹۰,۰۰۰ریال بود.۲۵,۷۰۰,۰۰۰ریالقیمت فعلی ۲۵,۷۰۰,۰۰۰ریال است.ماژولهای کنترل کننده ربات DEV-PIC32MX795F512H و DEV-PIC24FJ256GB206 و DEV-PIC18F67J50 ماژولهایی قابل برنامه ریزی برای کنترل ربات بر پایه میکروکنترلرهای برگزیده…







مرتبسازی بر اساس: