

مرتبسازی بر اساس:

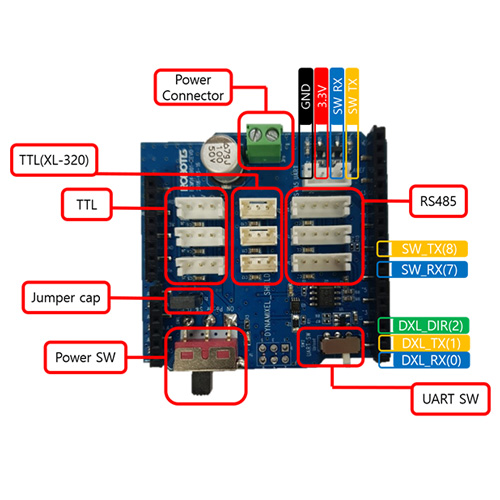
DYNAMIXEL Shield
۳۹,۸۱۰,۰۰۰ریالاز داینامیکسل شیلد، برای کنترل Dynamixel با استفاده از برد های Arduino استفاده میشود. داینامیکسل شیلد در بالای برد Arduino…
DYNAMIXEL Shield for Arduino MKR Series
۳۱,۸۳۰,۰۰۰ریالبه کمک این شیلد میتوانید موتورهای داینامیکسل خود را به وسیله بوردهای آردوینو سری MKR به آسانی، بدون نگرانی و…- تخفیف!
Fit-PC2i
قیمت اصلی ۳۳۶,۵۷۰,۰۰۰ریال بود.۸۴,۱۴۰,۰۰۰ریالقیمت فعلی ۸۴,۱۴۰,۰۰۰ریال است.fit-PC2 is a miniature fan less PC based on Atom CPU. It is extremely small and extremely energy efficient, but… - تخفیف!

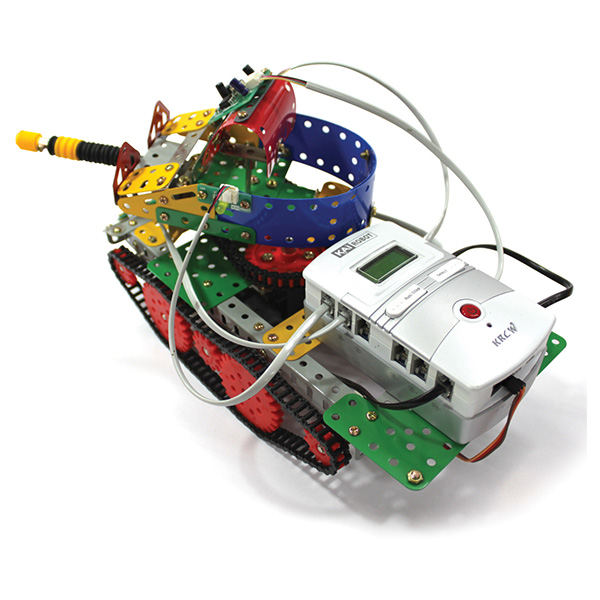
KRC Controller
قیمت اصلی ۱۰۳,۲۰۰,۰۰۰ریال بود.۲۵,۸۰۰,۰۰۰ریالقیمت فعلی ۲۵,۸۰۰,۰۰۰ریال است.به کمک کنترلر قابل برنامه نویسی KRC W، میتوان رباتهای مختلف را برنامه ریزی و کنترل نمود و آنها را هوشمند ساخت.… Logic Pack 1
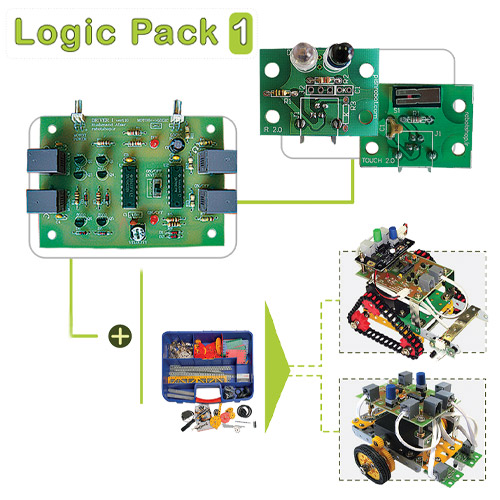
۲۲,۰۰۰,۰۰۰ریالپک لاجیک ۱ امکان تجربه و آشنایی با سنسورهای گوناگون و به طور کلی هوشمندسازی رباتها را بدون برنامهنویسی و…Logic Pack 2
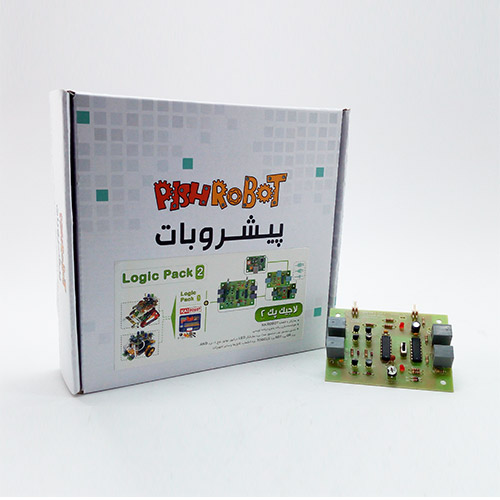
قیمت: تماس بگیریدپک لاجیک ۲، در ادامه مجموعه لاجیک ۱ ارائه میگردد و به کمک آن میتوان ربات هایی با هوشمندی بیشتر…- تخفیف!
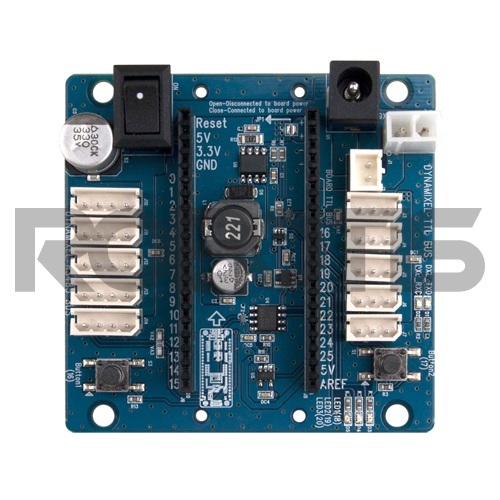
OpenCM 485 Expansion Board
قیمت اصلی ۵۹,۴۹۰,۰۰۰ریال بود.۲۹,۷۴۰,۰۰۰ریالقیمت فعلی ۲۹,۷۴۰,۰۰۰ریال است.به کمک این ماژول و نصب کنترلر OpenCM9.04 بر روی آن، میتوان علاوه بر موتورهای Dynamixel با پروتکل ارتباطی TTL… - تخفیف!
OpenCM9.04-Accessory Set
قیمت اصلی ۱۱,۶۶۰,۰۰۰ریال بود.۴,۶۶۰,۰۰۰ریالقیمت فعلی ۴,۶۶۰,۰۰۰ریال است.پک کانکتورهای قابل لحیم بر روی OpenCM9.04-A به همراه کابل USB برای آن OpenCM9.04-C
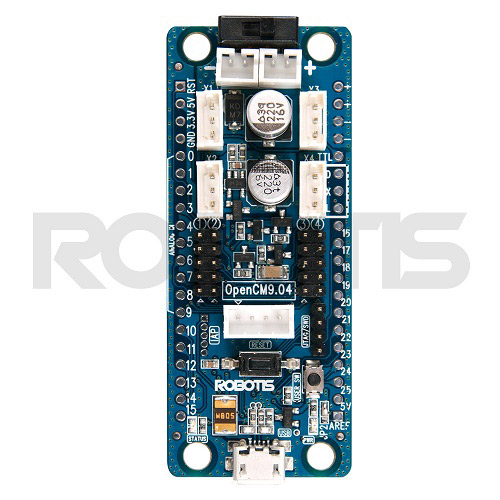
کنترلر OpenCM9.04 یک پردازنده open source بسیار سریع، ارزان قیمت و دارای پورت داینامیکسل نوع TTL است که محیط برنامهنویسی آن…OpenCR1.0
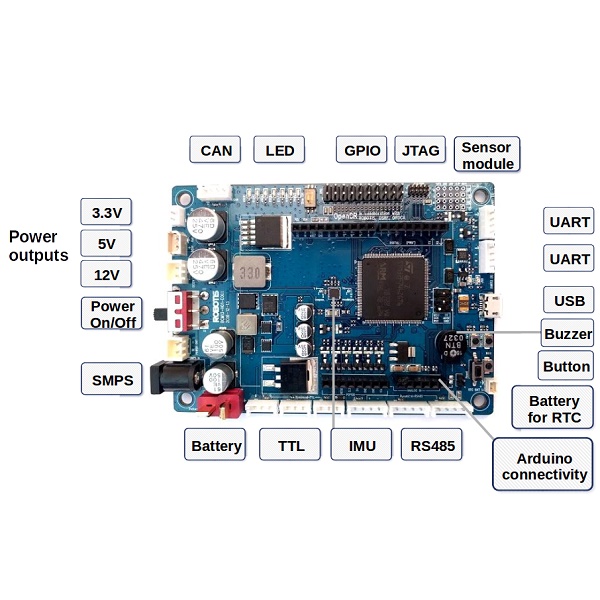
۳۵۸,۰۲۰,۰۰۰ریالOpenCR یک کنترلر متن باز و سخت افزار باز میباشد که میتواند تحت سیستم عامل ربات ها (ROS) و یا…PRB-300 Controller
۴۰,۸۰۰,۰۰۰ریالبه کمک کنترلر قابل برنامه نویسی PRB-300، میتوان رباتهای مختلف را برنامه ریزی و کنترل نمود و آنها را هوشمند…PRB-300B Controller
۴۳,۴۰۰,۰۰۰ریالربات خود را با بلوتوث برنامه ریزی و کنترل کنید. به کمک کنترلر قابل برنامه نویسی PRB-300B، میتوان رباتهای مختلف را علاوه…








مرتبسازی بر اساس: