


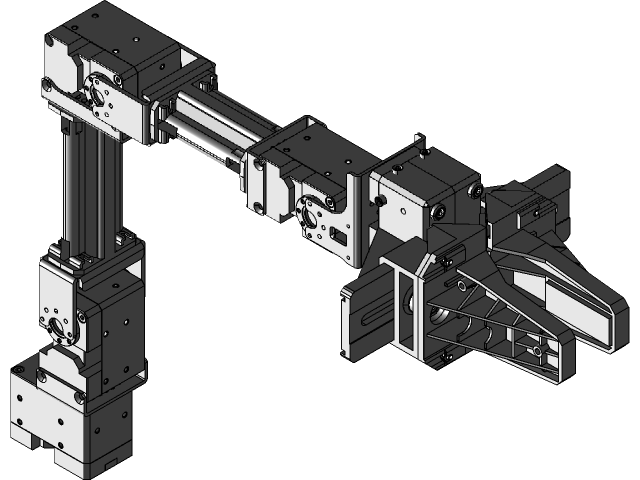
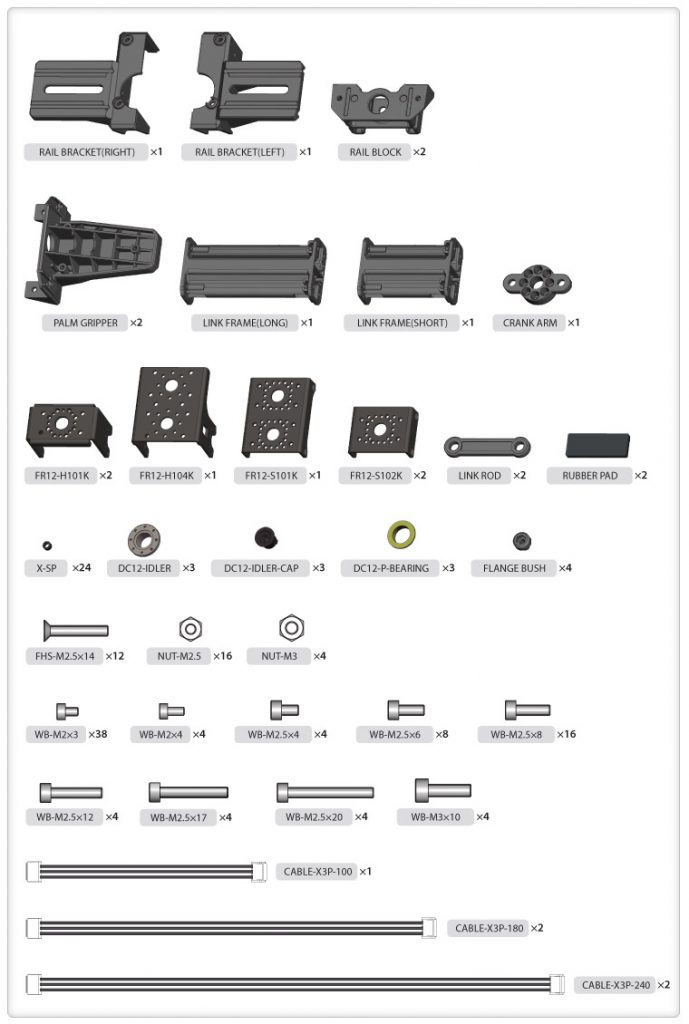
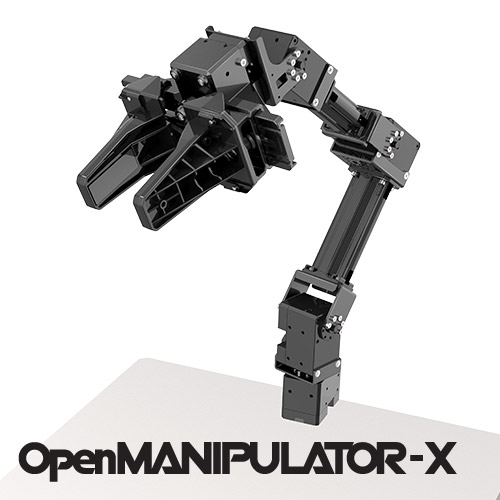
OpenManipulator-X RM-X52 Frame Set
برند: ROBOTIS
قابل سفارش:
بله
| وضعیت محصول: | کالا در انبار موجود و تحویل آن فوری میباشد. |
|---|
۴۵۵,۹۹۰,۰۰۰ریال
مشاهده سریع
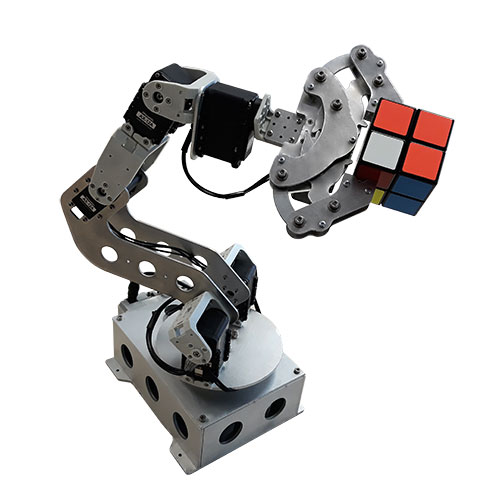
اگر به دنبال یک بازوی رباتیک پژوهشی پیشرفته به صورت سخت افزار/متن باز میگردید، کیت OpenManipulator X بهترین پیشنهاد ما به شما است. این بازوی رباتیک که سازگاری کامل با سیستم عامل رباتها (ROS) دارد، قابلیت اتصال آسان به رایانه و یا انواع موبایل ربات ها و پلتفرم های رباتیکی و توسعه ای پیشرفته ای نظیر Turtlebot3 Waffle Pi و… داشته و نمونه برنامه و محیط توسعه آماده آن به نحوی است که شما به آسانی میتوانید آن را برروی یک Turtlebot3 Waffle Pi نصب و راه اندازی کنید. این بسته فاقد موتورهای داینامیکسل است و شما بایستی به صورت جداگانه موتورها را تهیه فرمایید.



ROBOTIC ARM6X
۸۰۵,۱۵۰,۰۰۰ریال – ۱,۲۵۱,۸۰۰,۰۰۰ریال
انتخاب گزینه خرید
این محصول دارای انواع مختلفی می باشد. گزینه ها ممکن است در صفحه محصول انتخاب شوند
مقایسه





تخفیف!



تخفیف!



نقد و بررسیها
هنوز بررسیای ثبت نشده است.