

مرتبسازی بر اساس:

DYNAMIXEL XC430-W150-T
۱۹۹,۷۵۰,۰۰۰ریالXC Series | 12.0V | 1.6Nm | 106.00rpm | Coreless Motor | Metal Gear | TTL | 360° | 4096…
PRB-300 Controller
۳۷,۳۰۰,۰۰۰ریالبه کمک کنترلر قابل برنامه نویسی PRB-300، میتوان رباتهای مختلف را برنامه ریزی و کنترل نمود و آنها را هوشمند…DYNAMIXEL XC430-W240-T
۱۹۲,۰۸۰,۰۰۰ریالXC Series | 12.0V | 1.9Nm | 70.00rpm | Coreless Motor | Metal Gear | TTL | 360° | 4096…DYNAMIXEL Shield
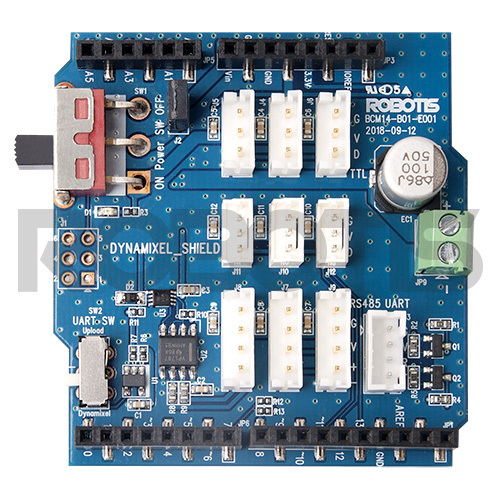
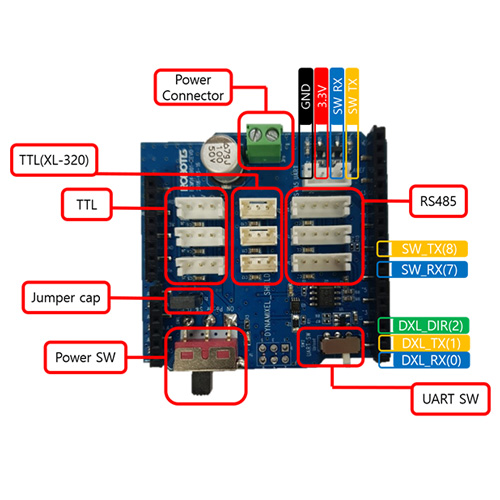
۳۹,۸۱۰,۰۰۰ریالاز داینامیکسل شیلد، برای کنترل Dynamixel با استفاده از برد های Arduino استفاده میشود. داینامیکسل شیلد در بالای برد Arduino…Wonder Workshop Dash Robot
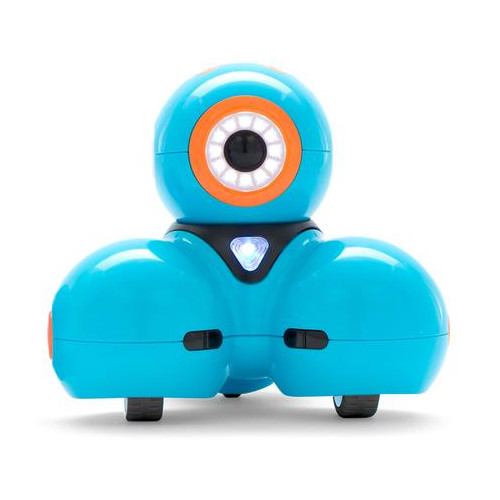
ربات کدنویسی Dash محبوب بچه ها و معلمان از سراسر جهان میباشد. Dash به اندازه کافی برای پاسخ دادن به…USB-TPA64
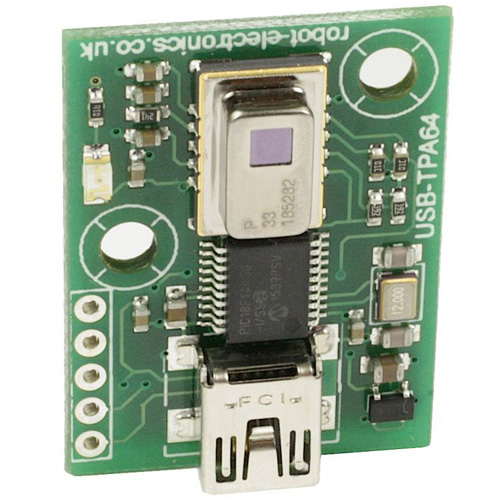
۸۶,۴۹۰,۰۰۰ریالماژول سنسور حرارتی آرایهای USB-TPA64 با ارتباط USB یک راه حل مقرون به صرفه اما قدرتمند برای تصویربرداری حرارتی است و…TPA64
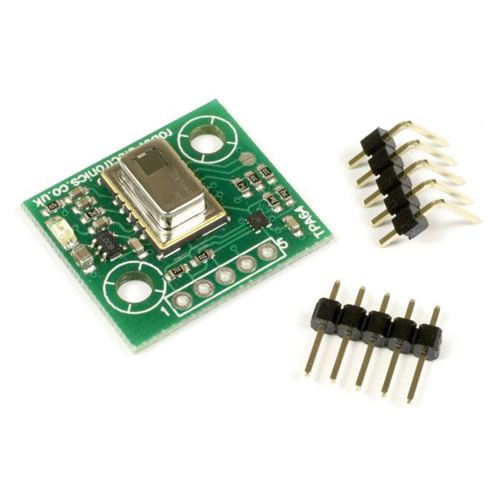
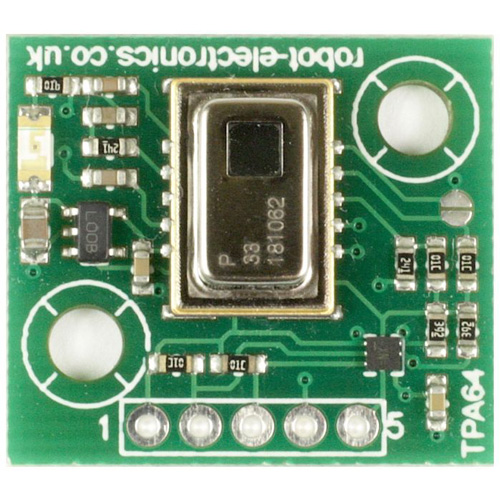
۸۰,۵۱۰,۰۰۰ریالماژول سنسور حرارتی آرایهای TPA64 با ارتباط I2C یک راه حل مقرون به صرفه اما قدرتمند برای تصویربرداری حرارتی است و…CMPS14
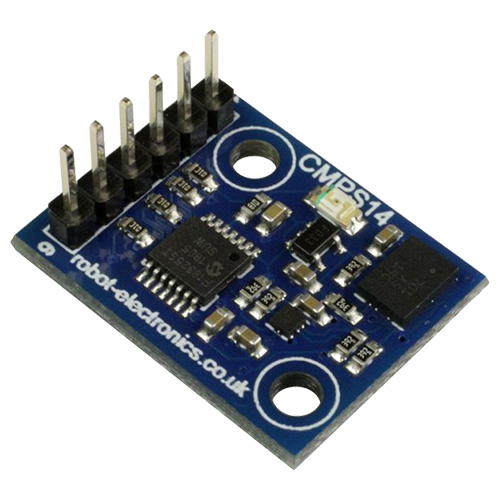
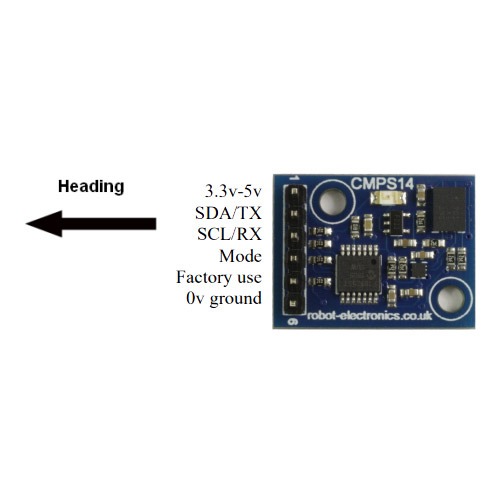
۵۸,۶۸۰,۰۰۰ریالنسل پنجم قطب نمای مغناطيسی شرکت دیونتک بر پایه Bosch BNO085 با قابليت جبران خطای انحراف از افق به کمک…FR13-H101K Set
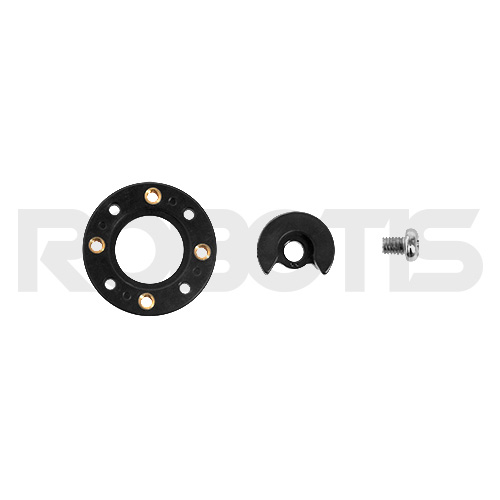
۱۱۱,۱۳۰,۰۰۰ریالفریم مفصل (Hinge) برای مدلهای 540 سری X داینامیکسل این محصول شامل فریم مفصل (Hinge) و ست هورن هرزگرد میباشد.DYNAMIXEL PRO PH42-020-S300-R
۲,۵۷۱,۴۰۰,۰۰۰ریالPH Series | 24.0V | 5.1Nm | 29.2rpm | Maxon Motor | Cycloid | RS-485 | 360° | 607500 pulse…DYNAMIXEL PRO PH54-200-S500-R
۴,۸۰۰,۱۰۰,۰۰۰ریالPH Series | 24.0V | 44.7Nm | 29.00rpm | Maxon Motor | Cycloid | RS-485 | 360° | 1003846 pulse…DYNAMIXEL PRO PH54-100-S500-R
۴,۴۵۷,۲۰۰,۰۰۰ریالPH Series | 24.0V | 25.3Nm | 29.20rpm | Maxon Motor | Cycloid | RS-485 | 360° | 1003846 pulse…Parrot Minidrone Swing with Flypad
قدرت یک هواپیما، سادگی یک کوادکوپتر پروت سویینگ (Parrot Swing) یک Minidrone است که به شما امکان میدهد به طرز…FR12-H103GM Set
۵۹,۴۹۰,۰۰۰ریالفریم مفصل (Hinge) سازگار با انواع مختلف سرو موتورهای داینامیکسل X430 از سری XFR12-H104K Set
۶۳,۴۸۰,۰۰۰ریالفریم خاص مفصل (Hinge) که در بازوی OpenManipulator استفاده شده است. سازگار با انواع مختلف سرو موتورهای داینامیکسل X430 از سری…






















مرتبسازی بر اساس: